7.1 图的基本概念
7.1.1 概念
图G由一个非空项点集V和一个顶点间的关系集合E(边的集合)组成的一种数据结构,可以用二元组定义为:。
7.1.2 有向图和无向图
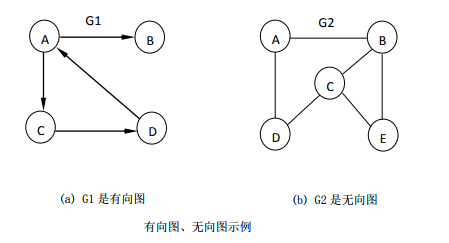
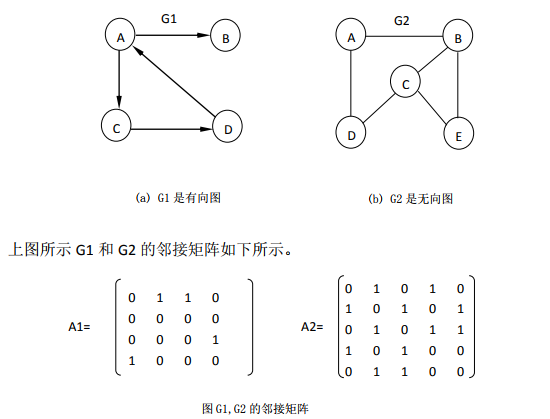
在图中,若用箭头标明了边是有方向性的,则称这样的图为有向图,否则称为无向图。
在无向图中,一条边(x, y)与(y, x)表示的结果相同,用圆括号表示。
在有向图中,一条边< x,y >与< y,x >表示的结果不相同,用尖括号表示。
< x,y >表示从顶点x指向顶点y的边,x为始点,y为终点。有向边也称为弧, x为弧尾, y为弧头。则< x,y >表示为一条弧, 而< y,x >表示y为弧尾, x为弧头的另一条弧 。
7.1.3 完全图、稠密图和稀疏图
具有n个顶点,n(n-1)/2条边的图,称为完全无向图;具有n个顶点,n(n-1)条弧的有向图,称为完全有向图。
完全无向图和完全有向图都称为完全图。
当一个图接近完全图时,则称它为稠密图。相反地,当一个图中含有较少的边或弧时(e < n\logn),则称它为稀疏图。
7.1.4 度、入度、出度和握手定理
在无向图中,关联于该顶点v的边的数目,称为该顶点的度,记为:。
在有向图中,把以顶点v为终点的边的数目,称为v的入度,记为:;
把以顶点v为始点的边的数目,称为v的出度,记为:;
顶点v的入度和出度之和称为该顶点的度,。
握手定理:度之和为边的两倍(有向图中入度必须等于出度等于边的个数)。
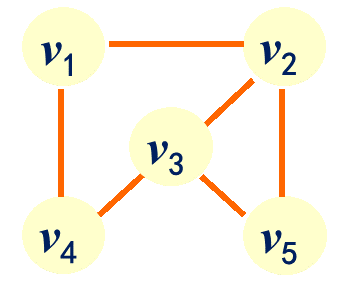
例1:在 中:
1 | V1={v1,v2,v3,v4 ,v5 } |
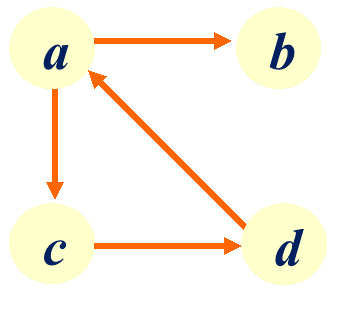
例2:在 中:
1 | V2={a,b,c,d} |
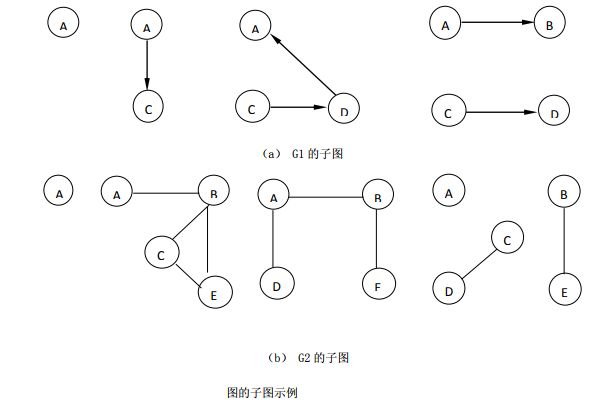
7.1.5 子图
若有两个图和,,,满足如下条件:
即为的子集,为的子集,称图为图的子图。下图给出了7.1.2中图的子图:
7.1.6 权和网
图中每一条边都可以附有一个对应的数值,这种与边相关的数据信息称为权。边上带有权的图称为带权图,也称作网。
7.1.7 路径、路径长度
路径长度是指一条路径上经过的边的数目。若一条路径上除开始点和结束点可以相同外,其余顶点均不相同,则称此路径为简单路径。
例如7.1.4中v1→v2→v5与v1→v4→v3→v5是从顶点v1到顶点v5的两条路径,路径长度分别为2和3。
7.1.8 回路和简单路径
若一条路径上的开始点与结束点为同一个顶点,则此路径被称为回路或环。开始点与结束点相同的简单路径被称为简单回路或简单环。
例如7.1.4中a→c→d→a为简单回路或简单环。
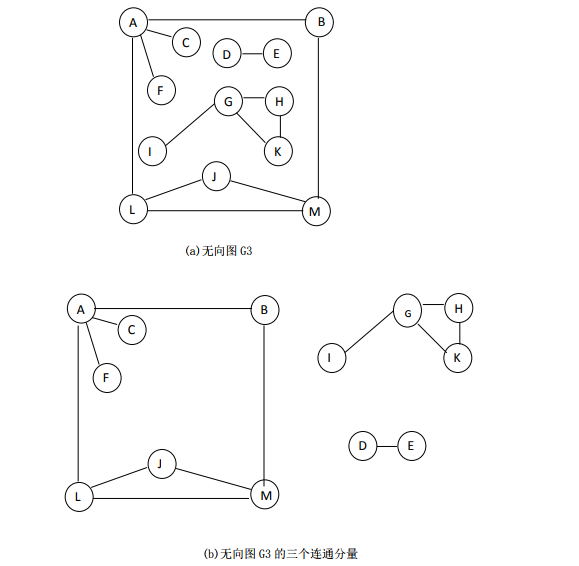
7.1.9 连通图
在无向图 中,若从 到 有路径相通,则称顶点 与 是连通的。如果对于图中的任意两个顶点,,都是连通的,则称该无向图 G 为连通图。无向图中的极大连通子图称为该无向图的连通分量,这里所谓的极大是指子图中包含的顶点个数极大。
在有向图 中,若对于每对顶点 且 ,从 到 和 到 都有路径,则称该有向图为强连通图。有向图的极大强连通子图称做有向图的强连通分量。
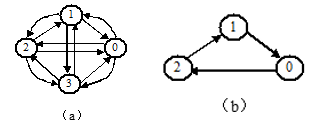
显然,强连通图只有一个强连通分量,即本身,非强连通图有多个强连通分量。
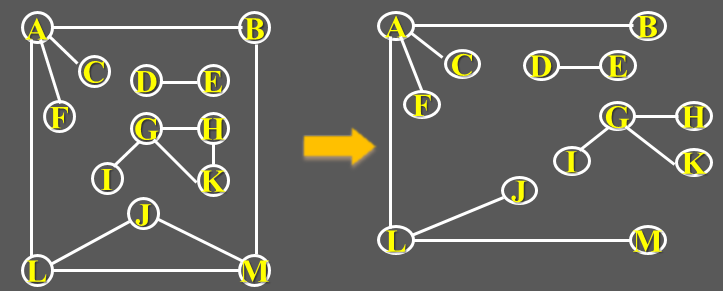
7.1.10 生成树、生成森林
连通图G的生成树,是G的包含其全部n个顶占的一个**极小连通子图,**它必定包含且仅包含G的n-1条边。
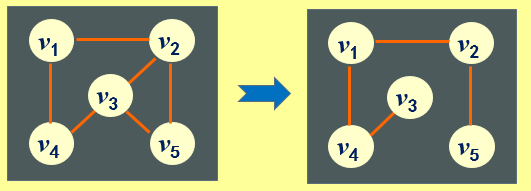
在非连通图G中,由每个连通分量都可以得到一个极小连通子图(一棵生成树)。这些连通分量的生成树就组成了一个非连通图的生成森林。
7.2 图的存储
7.2.1 邻接矩阵
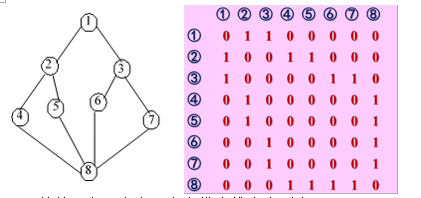
7.2.1.1 图的邻接矩阵表示
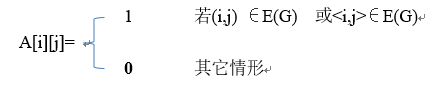
在邻接矩阵表示中,**除了存放顶点本身信息外,还用一个矩阵表示各个顶点之间的关系。**若(i,j)∈E(G) 或 < i,j >∈E(G),则矩阵中第i行第j列元素值为1,否则为0 。
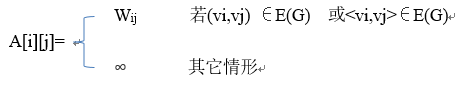
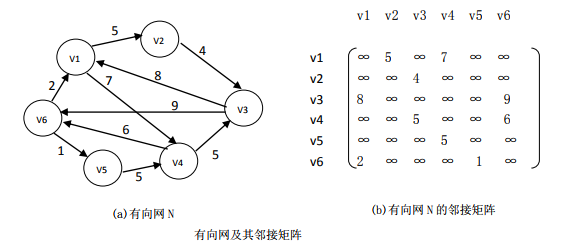
7.2.1.2 网的邻接矩阵表示
类似地可以定义网的邻接矩阵:
7.2.1.3 语言描述
1 |
|
算法时间复杂度:
7.2.2 邻接表
7.2.2.1 定义
图的邻接矩阵表示法虽然有其自身的优点,但对于稀疏图来讲,用邻接矩阵的表示方法会造成存储空间的很大浪费,为此引入邻接表表示法。
邻接表表示法实际上是图的一种链式存储结构,它包括两部分:
-
单链表,用来存放边的信息
-
数组,主要用来存放顶点本身的数据信息
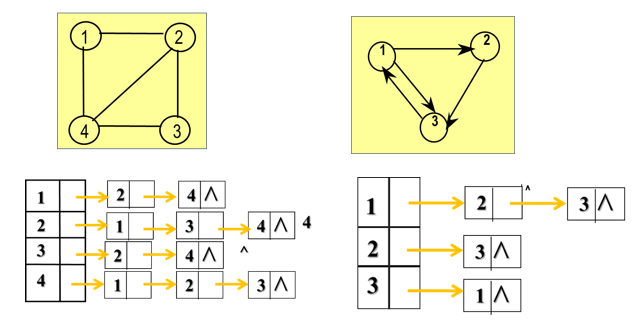
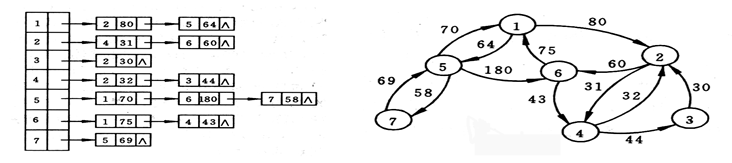
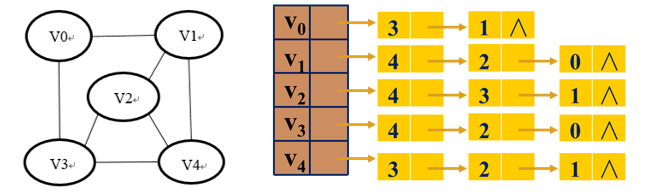
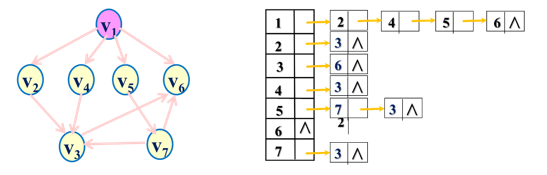
下图为某网的邻接表和网络图的示例:
7.2.2.2 优缺点
优点: 空间效率高;容易寻找顶点的邻接点。
缺点: 判断两顶点间是否有边或弧,需搜索两结点对应的单链表,没有邻接矩阵方便。
7.2.2.3 语言描述
1 | typedef char vextype; /*顶点的数据类型*/ |
7.2.3 比较
(1)联系
邻接表中每个链表对应于邻接矩阵中的一行,链表中结点个数等于一行中非零元素的个数。
(2)区别
对于任一确定的无向图,邻接矩阵是唯一的(行列号与顶点编号一致),但邻接表不唯一(链接次序与顶点编号无关)。
邻接矩阵的空间复杂度为 ,而邻接表的空间复杂度为 。
(3)用途
邻接矩阵多用于稠密图的存储,而邻接表多用于稀疏图的存储。
7.3 图的遍历
为避免同一顶点被多次访问,必须为每个被访问的顶点作一标志。为此引入一辅助数组,记录每个顶点是否被访问过。
设置一个全局型标志数组visited[0..n-1 ]来标志某个顶点是否被访问过,未访问的值为 0,访问过的值为 1。
7.3.1 深度优先搜索遍历
7.3.1.1 步骤
-
首先访问顶点 ,并将其访问标志置为访问过,即
visited[i]=1。 -
然后搜索与顶点 有边相连的下一个顶点 ,若 未被访问过,则访问它,并将 的访问标志置为访问过,
visited[j]=1,然后从 开始重复此过程;若 已访问,再看与 有边相连的其它顶点。 -
若与 有边相连的顶点都被访问过,则退回到前一个访问顶点并重复刚才过程,直到图中所有顶点都被访问完为止。
7.3.1.2 邻接矩阵实现
算法描述如下所示
1 | void dfs (int i) { // 从顶点i 出发遍历 |
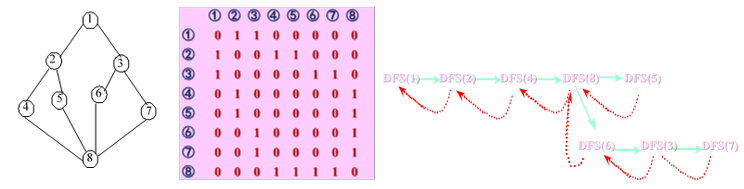
上图描述从顶点1出发的深度优先搜索遍历过程,其中实线表示下一层递归调用,虚线表示递归调用的返回。得到从顶点1的遍历结果为: 。
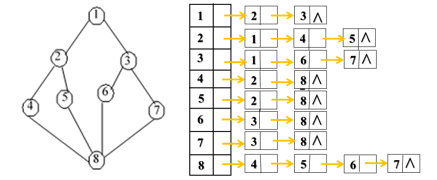
7.3.1.3 邻接表实现
算法描述如下所示:
1 | void dfsl(int i) { //从V i+1出发深度优先搜索图gl,gl用邻接表表示 |
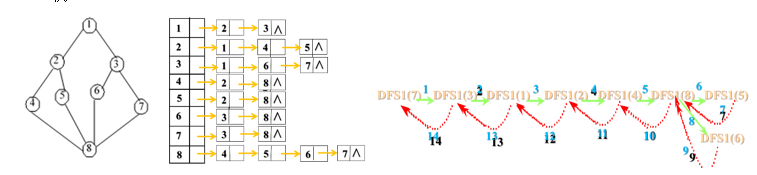
上图描述从顶点7出发的深度优先搜索遍历,其中实线表示下一层递归,虚线表示递归返回,箭头旁边数字表示调用的步骤。从顶点7出发的深度优先搜索遍历序列:。
7.3.2 广度优先搜索遍历
和深度优先搜索类似,在遍历的过程中也需要一个访问标志数组。
并且,为了顺次访问路径长度为2、3、…的顶点,需附设队列以存储已被访问的路径长度为1,2,…的顶点。
7.3.2.3 步骤
首先访问顶点 ,并将其访问标志置为已被访问,即visited[i]=1;
接着依次访问与顶点 有边相连的所有顶点 ,,…,;
然后再按顺序访问与 ,,…, 有边相连且未曾访问过的顶点;依此类推,直到图中所有顶点都被访问完为止。
7.3.2.3 邻接矩阵实现
算法描述如下所示:
1 | void bfs( int k) { |
若从顶点1出发,广度优先搜索序列为:
若从顶点3出发,广度优先搜索序列为:
7.3.2.3 邻接表实现
算法描述如下所示:
1 | void bfsl (int k) { |
若从顶点1出发,广度优先搜索序列为:
若从顶点7出发,广度优先搜索序列为:
7.4 生成树与最小生成树
7.4.1 生成树
连通图G的一个极小连通子图,它含有图中n个顶点,但只有n-1条边。
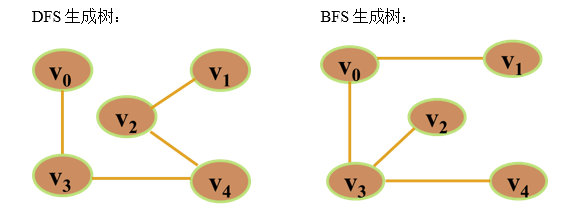
由深度优先搜索遍历得到的生成树,称为深度优先生成树(DFS生成树)。
由广度优先搜索遍历得到的生成树,称为广度优先生成树(BFS生成树)。
例1:画出下图的最小生成树(从 出发)
例2:画出下图的最小生成树

7.4.2 最小生成树
生成树中每条边上权值之和达到最小,称为最小生成树。
7.4.2.1 构造准则
-
必须只使用该网络中的边来构造最小生成树;
-
必须使用且仅使用n-1条边来联结网络中的n个顶点;
-
不能使用产生回路的边。
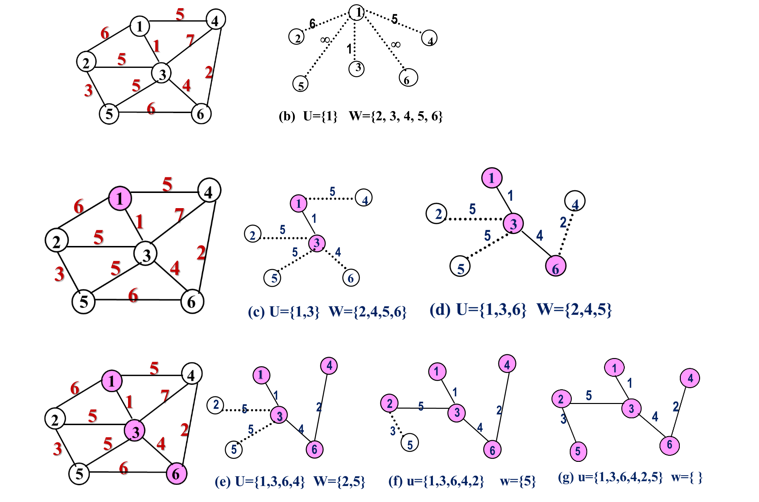
7.4.2.2 Prim算法
-
假设 是连通图,TE是G上最小生成树中边的集合。
-
算法从 开始,任取一个顶点 作为开始点。
-
重复执行下述操作:在所有 的边 中找一条代价最小的边 并入集合TE,同时v0并入U,直至 为止。
**注意:**选择最小边时,可能有多条同样权值的边可选,此时任选其一。
例:假设开始顶点就选为顶点1,故首先有U={1},W=V-U={2, 3, 4, 5, 6}:
1 | //时间复杂度O(n×n) |
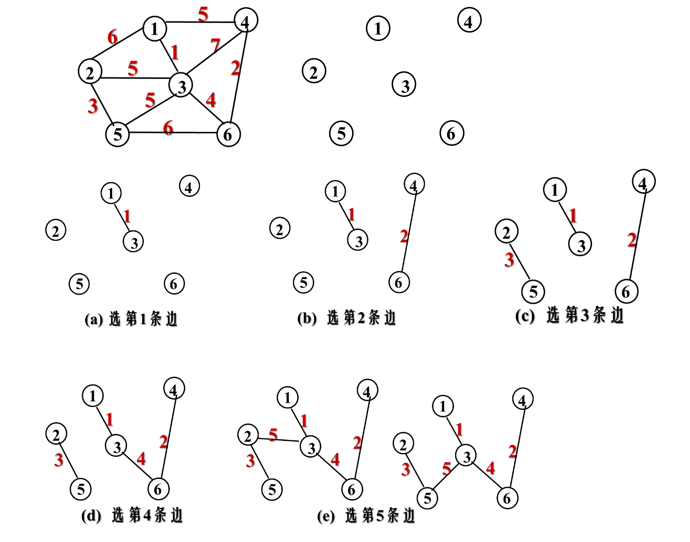
7.4.2.3 Kruskar算法
-
假设 是连通图,则令最小生成树的初始状态为只有
n个顶点而无边的非连通图 。 -
从E中选择代价最小的边,若该边依附的顶点落在T中不同的连通分量上,则将此边加入到T中,否则舍去此边选择下一条代价最小的边。依次类推,直至T中所有顶点都在同一连通分量上为止。
例:用Kruskar算法求最小生成树。
1 | // 邻接矩阵 |
7.5 最短路径
如果将交通网络画成带权图,结点代表地点,边代表城镇间的路,边权表示路的长度,则经常会遇到如下问题:两给定地点间是否有通路?如果有多条通路,哪条路最短?
还可以根据实际情况给各个边赋以不同含义的值。例如,对司机来说,里程和速度是他们最感兴趣的信息;而对于旅客来说,可能更关心交通费用。有时,还需要考虑交通图的有向性,如航行时,顺水和逆水的情况。
带权图的最短路径是指两点间的路径中边权和最小的路径。
7.5.1 Dijkstra算法
给定一个出发点(单源点)和一个有向网G=(V, E), 求出源点到其它各顶点之间的最短路径。
7.5.1.1 算法思想
(1)把图中顶点集合分成两组,第一组为集合S,存放已求出其最短路径的顶点,第二组为尚未确定最短路径的顶点集合是V-S(令W=V-S),其中V为网中所有顶点集合。
(2)按最短路径长度递增的顺序逐个把W中的顶点加到S中,直到S中包含全部顶点,而W为空。
(3)在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到W中任何顶点的最短路径长度。
(4)此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,W中的顶点的距离从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
7.5.1.2 实现步骤
(1)初始时,S只包含源点,S={v},v的距离为0。U包含除v外的其他顶点,U中顶点的距离为顶点的权或∞ 。
(2)从U中选取一个距离最小的顶点k,把k加入到S中。
(3)以k 作为新考虑的中间点,修改U中各顶点的距离。
(4)重复步骤(1)、(2)直到所有顶点都包含在S中。
7.5.1.3 例题
求v0到其它各点的最短路径:
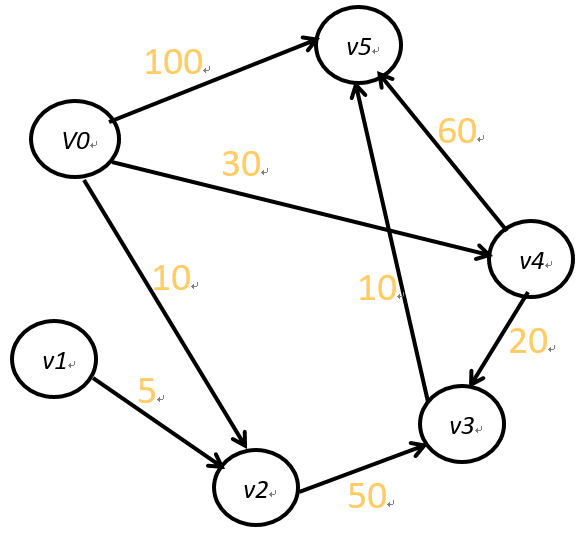
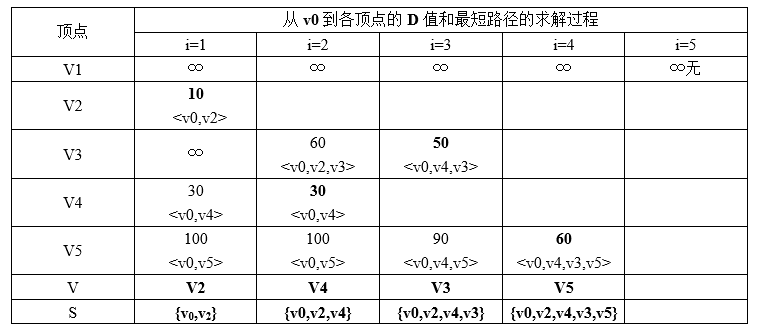
所以最短路径为(V0,V2,V4,V3,V5)。
7.5.1.4 算法实现
1 |
|
7.5.2 Floyd算法
Dijkstra算法只能求出源点到其它顶点的最短路径,欲求任意一对顶点间的最短路径,可以
用每一顶点作为源点,重复调用狄杰斯特拉算法 n 次,其时间复杂度为 。
下面介绍一种形式更简洁的方法,即Floyd算法,其时间复杂度也是 。
7.5.2.1 算法思想
Floyd算法是一个经典的动态规划算法。用通俗的语言来描述的话,首先我们的目标是寻找从点i到点j的最短路径。从动态规划的角度看问题,我们需要为这个目标重新做一个诠释。
从任意节点i到任意节点j的最短路径不外乎两种可能,一是直接从i到j,二是从i经过若干个节点k到j。
所以,我们假设 为节点u到节点v的最短路径的距离,对于每一个节点k,我们检查 是否成立,如果成立,证明从i到k再到j的路径比i直接到j的路径短,我们便设 ,这样一来,当我们遍历完所有节点k, 中记录的便是i到j的最短路径的距离。
7.5.2.2 实现步骤
(1)从任意一条单边路径开始。所有两点之间的距离是边的权,如果两点之间没有边相连,则权为无穷大。
(2)对于每一对顶点 u 和 v,看看是否存在一个顶点 w 使得从 u 到 w 再到 v 比己知的路径更短。如果是更新它。
7.5.2.3 算法实现
1 | typedef SeqList VertexSet; |
7.6 拓扑结构与AOV网
7.6.1 AOV网
在一个有向图中,若用顶点表示活动,有向边表示活动间先后关系,则称该有向图叫做顶点活动网(Activity On Vertex network),简称为AOV网。
在AOV网中,若从顶点i到顶点j之间存在一条有向路径,称顶点i是顶点j的前驱,或者称顶点j是顶点i的后继。
若 ,则称顶点i是顶点j的直接前驱,顶点j是顶点i的直接后继。
7.6.2 拓扑排序
给出有向图 ,对于V中的顶点的线性序列(),如果满足如下条件:若在G中从顶点 到 有一条路经,则在序列中顶点 必在顶点 之前;则称该序列为 G的一个拓扑序列(Topological order)。
构造有向图的一个拓扑序列的过程称为拓扑排序(Topological sort)。
拓扑排序实现步骤如下:
(1)从AOV网中选一个入度为0的顶点v且输出之;
(2)从AOV网中删除此顶点v及所有出边;
(3)重复(1)、(2)两步,直到AOV网中不存在无前驱的顶点为止。
7.6.3 说明
(1)AOV网不一定都有拓扑序列。
(2)AOV网中不能出现有向回路(或称有向环)。
判断AOV网是否有有向环的方法是对该AOV网进行拓扑排序,将AOV网中顶点排列成一个线性有序序列,若该线性序列中包含AOV网全部顶点,则AOV网无环;否则,AOV网中存在有向环,该AOV网所代表的工程是不可行的。
7.6.4 例题
求下图所示的拓扑序列
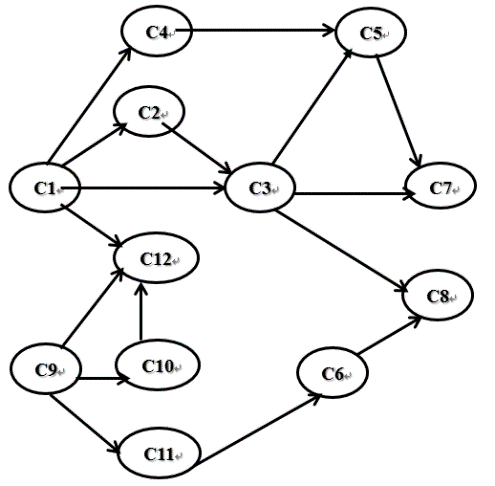
拓扑序列:
C1–C2–C3–C4–C5–C7–C9–C10–C11–C6–C12–C8
C9–C10–C11–C6–C1–C12–C4–C2–C3–C5–C7–C8
注:一个AOV网的拓扑序列不是唯一的。
7.7 关键路径与AOE网
7.7.1 AOE网
在带权的有向图中,以顶点表示事件,弧表示活动,权表示活动的开销,则称此带权的有向图为用边表示活动的网络,简称AOE网。
在一个表示工程的AOE网中:不存在回路。网中仅存在一个入度为0的顶点,称作源点,它表示了整个工程的开始;网中仅存在一个出度为0的顶点,称为汇点,它表示整个工程的结束。
从源点到汇点的最长路径的长度即为完成整个工程任务所需的时间,该路径叫做关键路径。关键路径上的活动叫做关键活动。
7.7.2 关键路径
把从源点到汇点的最长路径称为关键路径,关键路径上的活动称为关键活动。
在一个AOE网中,可以有不止一条的关键路径。
例:求出下图的关键路径:
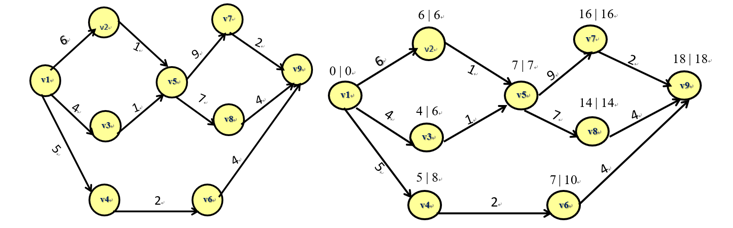
上方右图为计算过程,关键路径为:
V1→ V2 →V5 →V7 →V9
V1→ V2 →V5→ V8 →V9
注:从源点到汇点时,选择较大的权值。从汇点到源点时,选择较小的权值。来回均相同的路径就是关键路径。
7.8 例题
7.8.1 例1
有8个结点的无向图最多有【 】条边,最少有【 】条边。
28 ; 7
(注:无向图最多需要n(n-1)/2条边,最少需要n-1条边。有向图最多n(n-1)条边。)
7.8.2 例2
深度优先遍历类似于二叉树的【 】,广度优先遍历类似于二叉树的【 】。
先序遍历 ; 层次遍历
7.8.3 例3
任何一个无向连通图的最小生成树【 】。
不唯一
7.8.4 例4
求稀疏图的最小生成树,用【 】算法来求解较好。求稠密图的最小生成树,用【 】算法来求解较好。
Kruskar ; Prim
7.8.5 例5
在有向图的邻接矩阵上,第i行中的非零且非无穷元素个数是第i个结点的【 】。
出度
7.8.6 例6
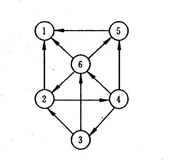
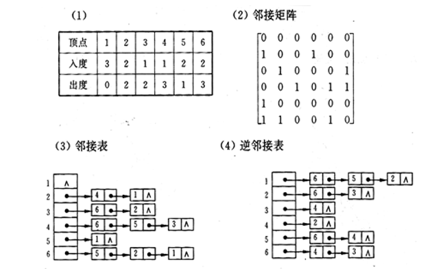
已知下图所示的有向图,请给出该图的:
(1)每个顶点的入/出度;
(2)邻接矩阵;
(3)邻接表;
(4)逆邻接表。
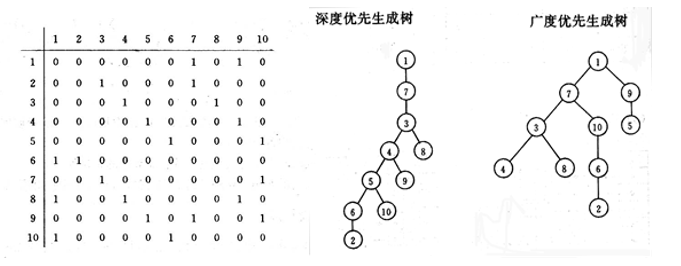
7.8.7 例7
已知二维数组表示的图的邻接矩阵如下图所示。试分别画出自顶点1出发进行遍历所得的深度优先生成树和广度优先生成树。
7.8.8 例8
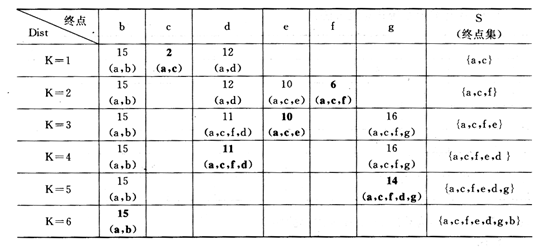
试利用Dijkstra算法求图中从顶点a到其他各顶点间的最短路径,写出执行算法过程中各步的状态。
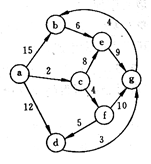
解:最短路径为:(a,c,f,e,d,g,b)。
7.8.9 例9
给定网G:
(1) 试着找出网G的最小生成树,画出其逻辑结构图。
(2) 用两种不同的表示法画出网G的存储结构图。
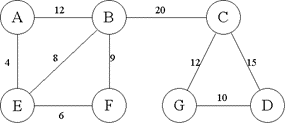
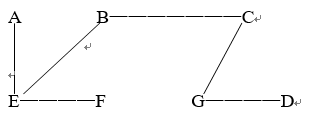
解:
(1)最小生成树如下图所示。
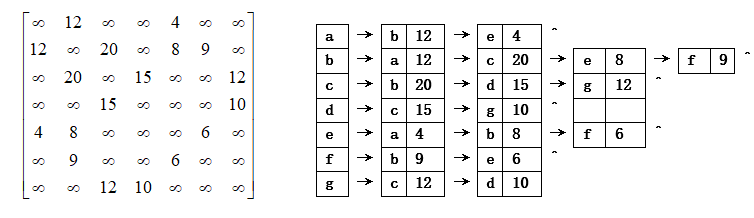
(2)邻接矩阵表示和邻接表表示。
 wechat
wechat- alipay


